

C. HX711 Load cell

D. Inductive Proximity Sensor

E. Breadboard

F. Motor DC
G. Push Pull Solenoid

H. Motor Servo

I. Liquid Crystal Display I2C

J. STM32103C8

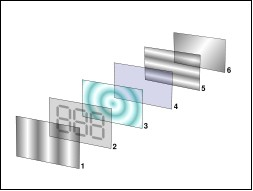
Sensor ultrasonik HC-SR04 adalah suatu sensor yang fungsinya mengubah besaran fisis bunyi menjadi besaran listrik maupun sebaliknya. Fungsi sensor ultrasonik HC-SR04 biasa digunakan untuk mendeteksi objek yang ada di depannya dengan memanfaatkan gelombang ultrasonik.
Sensor ultrasonik HC SR04 memiliki sepasang transduser ultrasonik yang berfungsi sebagai transmitter (memancarkan gelombang) dan receiver (menerima pantulan gelombang). Cara kerja sensor HC SR04 berawal dari gelombang ultrasonik berfrekuensi 40 kHz (sesuai osilator) yang dibangkitkan oleh piezoelektrik sebagai transmitter-nya. Kemudian gelombang yang terbentuk dipancarkan mengenai target. Hasil pantulan gelombang tersebut nantinya akan diterima oleh receiver piezoelektrik untuk dikalkulasikan waktu pengiriman dan waktu diterimanya gelombang pantul tersebut.
Hasil pengalkulasian itulah nanti yang akan kita peroleh sebagai nilai jarak.Prinsip kerja sensor ultrasonik HC-SR04 kurang lebih hampir sama dengan contoh gambar kelelawar yang mendeteksi buah di depannya. Kira-kira bentuk ilustrasi cara kerja HC SR04 seperti ini.

Rumus sensor ultrasonik diambil dari rumus kecepatan. Karena sudah diketahui kecepatan rambat bunyi berada di kisaran 340 m/s, maka rumus menghitung jarak sensor ultrasonik adalah:
S = 340.t / 2
Keterangan :
S= Jarak objek
t= Selisih waktu dipancarkan dan diterimanya gelombang
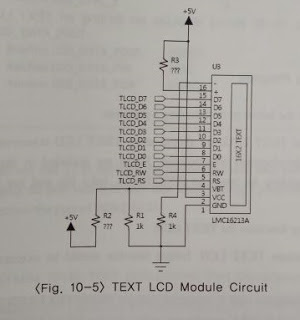
- Pin Trig (Trigger), trigpin Arduino berfungsi untuk memicu pemancaran gelombang ultrasonik. Gelombang akan terpancarkan saat pin ini diberikan logika HIGH.
- Pin Echo, berfungsi untuk mendeteksi pantulan gelombang ultrasonik apakah sudah diterima atau belum. Pin Echo bernilai HIGH jika gelombang pantulan belum diterima dan bernilai LOW jika pantulan sudah diterima.
- Pin VCC, berfungsi untuk mengoneksikan sensor ke power supply 5 volt Arduino. Jadi kamu bisa langsung mengoneksikan pin VCC ke pin 5V di Arduino.
- Pin GND, berfungsi untuk mengoneksikan sensor ke power supply ground. Sama dengan pin VCC, kamu juga bisa langsung menghubungkan pin GND ini ke pin GND Arduino
- Piezoelektrik, fungsi dari komponen ini adalah mengubah energi listrik menjadi energi mekanik yang menghasilkan gelombang ultrasonik maupun sebaliknya.
- Transmitter, yaitu komponen yang berfungsi untuk memancarkan gelombang ultrasonik yang dihasilkan oleh piezoelektrik ke objek yang ingin diukur jaraknya.
- Receiver, berfungsi untuk menerima pantulan gelombang ultrasonik dari objek yang ingin diukur jaraknya.
- Dekat IR – 0,75µm hingga 3 µm
- Pertengahan IR – 3 µm hingga 6 µm
- IR Jauh – > 6 µm
Elemen kunci dari Sistem Deteksi Inframerah adalah:
IR Transmitter bertindak sebagai sumber radiasi IR. Menurut Hukum Radiasi Plank, setiap benda merupakan sumber radiasi IR pada suhu T di atas 0 Kelvin. Dalam kebanyakan kasus, radiator benda hitam, lampu tungsten, silikon karbida, laser inframerah, LED panjang gelombang inframerah digunakan sebagai sumber.
b. Media Tranmisi
Seperti namanya, Media Transmisi menyediakan jalur untuk mencapai radiasi dari Pemancar IR ke Penerima IR. Vakum, atmosfer, dan serat optik digunakan sebagai media.
c. Penerima IR
Umumnya penerima IR adalah dioda foto dan transistor foto. Mereka mampu mendeteksi radiasi infra merah. Oleh karena itu penerima IR juga disebut sebagai detektor IR. Berbagai penerima tersedia berdasarkan panjang gelombang, voltase dan paket. Pemancar dan Penerima IR dipilih dengan parameter yang cocok. Beberapa spesifikasi penerima yang menentukan adalah fotosensitifitas atau responsivitas, daya setara kebisingan dan deteksi.
- Sumber IR (pemancar) digunakan untuk memancarkan radiasi dengan panjang gelombang yang dibutuhkan.
- Radiasi ini mencapai objek dan dipantulkan kembali.
- Radiasi yang dipantulkan terdeteksi oleh penerima IR.
- Radiasi yang terdeteksi Penerima IR kemudian diproses lebih lanjut berdasarkan intensitasnya. Umumnya, output Penerima IR kecil dan amplifier digunakan untuk memperkuat sinyal yang terdeteksi.

C. Sensor Load cell
Sensor load cell merupakan sensor yang dirancang untuk
mendeteksi tekanan atau berat sebuah beban, sensor load cell
umumnya digunakan sebagai komponen utama pada sistem
timbangan digital dan dapat diaplikasikan pada jembatan
timbangan yang berfungsi untuk menimbang berat dari truk
pengangkut bahan baku, pengukuran yang dilakukan oleh Load
Cell menggunakan prinsip tekanan.
Prinsip kerja load cell ketika mendapat tekanan
beban.Ketika bagian lain yang lebih elastic mendapat
tekanan, maka pada sisi lain akan mengalami perubahan
regangan yang sesuai dengan yang dihasilkan oleh strain
gauge, hal ini terjadi karena ada gaya yang seakan melawan
pada sisi lainnya. Perubahan nilai resistansi yang
diakibatkan oleh perubahan gaya diubah menjadi nilai
tegangan oleh rangkaian IC HX711. Dan berat dari objek yang
diukur dapat diketahui dengan mengukur besarnya nilai
tegangan yang timbul.
Beberapa karakteristik yang terdapat pada load cell sensor
antara lain adalah:
- Tegangan Operasi: 5V DC (umum untuk load cell
kecil)
- Rentang Kapasitas: Bervariasi (misalnya, 1kg, 5kg, 10kg,
hingga beberapa ton)
- Tegangan Output: 1 mV/V hingga 3 mV/V (bergantung pada
beban penuh)
- Non-linearitas: ±0.03% hingga ±0.1% dari kapasitas
penuh
- Histeresis: ±0.02% hingga ±0.05% dari kapasitas
penuh
- Suhu Operasi: -10°C hingga 40°C (umum untuk load cell
kecil)
Macam-macam loadcell
1. Loadcell Single Point Load cell bench scale.
Loadcell ini dipasang pada bagian tengah platform
timbangan.
2. Loadcell Shear Beam Load cell ini dipakai untuk
floor scale.
3. Loadcell Compress Cara penggunaan Load cell ini
adalah dengan menekan bagian atasnya. Biasanya load cell
jenis ini di pakai untuk timbangan truck.
4. Loadcell Model S 3 Dinamakan Loadcell S karena
bentuknya menyerupai huruf "S". cara kerja dari Load cell
ini tidak di tekan melainkan ditarik sisi atas dan bawahnya.
Sisi atas dikaitkan dengan gantungan sedangkan bagian
bawahnya dikaitkan dengan barang yang akan ditimbang.
5. Loadcell Double Ended Load cell ini bekerja dengan menekan sisi tengahnya. Loadcell ini dipakai untuk timbangan truck.

Grafik Respon Sensor Load Cell
Sensor jarak digunakan di lingkungan industri untuk mendeteksi keberadaan benda-benda. Ada dua jenis utama objek; Logam dan non-logam. Sensor jarak induktif dirancang khusus untuk mendeteksi benda logam. Sensor induktif milik keluarga sensor kedekatan. Mereka menggunakan prinsip induksi elektromagnetik untuk mendeteksi dan mengukur objek. Ada sensor keluaran digital dan analog yang tersedia di pasar.
Prinsip Kerja Sensor Inductive Proximity
Sensor jarak induktif menggunakan prinsip induksi elektromagnetik
untuk mendeteksi keberadaan objek logam. Sensor ini terlihat sangat mirip
dengan kapasiti sensor jarak dalam hal ukuran. Semua perangkat itu padat dan
tidak memiliki bagian yang bergerak yang dapat rusak. Saklar elektroniknya
tidak mudah untuk kontak dengan kontaminasi, erosi kontak, atau pentransferan
materi seperti yang dikendalikan oleh mesin.
Perubahannya tidak sensitif terhadap getaran, dan positif tanpa
percakapan, tidak peduli seberapa lambat sasaran akan mendekat atau hilang dari
sensor. Sirkuit osilator resonansi, terletak di saklar jarak, menggunakan
kumparan inti terbuka untuk membantu menghasilkan medan elektromagnetik
frekuensi tinggi terkonsentrasi, yang muncul dari permukaan sensor aktif. Jika
target logam memasuki bidang ini, arus eddy didorong.

Arus yang diinduksi arus mengambil energi dari sirkuit LC. Muatan
pada sirkuit osilator mengingatkan penurunan dalam amplitudo yang berosilasi.
Osilator sudah diperiksa. Penurunan amplitudo yang berosilasi diubah menjadi
sinyal listrik oleh sirkuit elektronik, yang mengarah pada perubahan keadaan
dari saklar jarak dekatnya. Ketika bahan konduktif listrik dikeluarkan dari
bidang induktif, denyut amplitudo meningkat dan melalui sirkuit elektronik
posisi switching asli direproduksi. Osilator tak dijaga.
Saklar kedekatan induktif didasarkan pada prinsip dari lc-osilator.
Kumparan sirkuit osilator menghasilkan medan magnet frekuensi tinggi. Bidang
ini memancarkan radiasi dari kedekatan switch face. Jika medan ini ditembus
oleh logam ferrous atau non-ferrous, energi berkurang dan dengan demikian
osilator akan dikumpulkan. Hasil dari perubahan konsumsi saat ini dievaluasi.
Bagaimana Sensor jarak induktif mendeteksi benda logam?
Sensor jarak induktif menggunakan prinsip yang sama arus Eddy untuk
mendeteksi benda logam. Mereka mengukur perubahan arus eddy diinduksi dalam
objek sekarang, dan keluaran sinyal sesuai. Mengukur arus Eddy di dekat objek
namun, adalah tugas yang rumit. Oleh karena itu, sensor jarak induktif juga
memiliki sirkuit rumit di dalamnya untuk memproses sinyal dan memberikan
keluaran yang layak.

Ketika diaktifkan, sensor menciptakan berosilasi medan magnet pada
wajah. Medan magnet ini dibuat menggunakan osilator LC, yang terdiri dari
sebuah kapasitor dan koil. Sebuah sirkuit khusus mempertahankan frekuensi
osilasi pada konstan. Untuk sensor AC frekuensi ini sekitar 10 sampai 20 Hz,
sementara sensor DC bekerja di 500Hz sampai 5kHz jangkauan. Sewaktu sebuah
benda logam memasuki medan magnet yang dihasilkan, medan itu akan menghasilkan
arus listrik di dalam benda itu. Hal ini juga menyebabkan arus Eddy beredar di
dalam objek. Sebagaimana disebutkan sebelumnya, arus Eddy mengganggu medan
magnet yang dihasilkan oleh sensor.
Gangguan ini mengurangi osilasi alami di sirkuit osilator. Ini juga
dikenal sebagai ‘damping magnetik’. Damping magnetik meningkatkan beban pada
osilasi. Selanjutnya, hal itu mengurangi jangkauan sinyal yang berosilasi.
Sebuah sirkuit komparator terpisah memonitor sinyal ini berosilasi. Setiap kali
jangkauan sinyal mencapai batas tertentu di bawah atau di atas, sirkuit
mengaktifkan keluaran. Untuk sensor digital, ini adalah sinyal output tinggi
atau rendah logika. Untuk sensor analog, sinyal keluaran adalah sinyal arus
atau tegangan.
Fungsi Breadboard :
Kegunaan breadboard yaitu sebagai media penghantar (konduktor listrik) sekaligus tempat kabel jumper dilekatkan. Sehingga arus dari satu komponen bisa terdistribusi dengan baik sesuai keinginan ke komponen lain tanpa harus merepotkan pengguna untuk melakukan penyolderan atau melakukan bongkar pasang.Salah satu kelebihan tersendiri dari penggunaan breadboard adalah komponen-komponen yang telah dirakit tak akan rusak dan mudah untuk dibongkar pasang. Ini karena papan breadboard merupakan papan tanpa solder (solderless).

Cara Kerja Breadboard :
Breadboard bisa dideskripsikan sebagai papan yang memiliki lubang koneksi berdasarkan pola tertentu. Untuk menghubungkan antara satu lubang dengan lubang yang lain, maka di bagian bawah lubang tersebut terdapat logam konduktor listrik yang diposisikan secara khusus. Ini berguna untuk memudahkan pengguna dalam membuat rangkaian. Logam konduktor yang ada di dalam breadboard umumnya seperti ini:
Kira-kira posisi logam jalur breadboard bisa digambarkan sebagai berikut:

Berdasarkan gambar di atas, fungsi dari masing-masing jalur koneksi pada breadboard dengan keterangan warnanya yaitu sebagai berikut:
- Jalur warna merah, digunakan untuk menempatkan pin 5V atau kutub positif dari arduino untuk dihubungkan ke kutub positif komponen lain.
- Jalur warna biru, digunakan untuk menempatkan pin GND atau kutub negatif dari arduino untuk dihubungkan ke kutub negatif komponen lain.
- Jalur warna hijau, digunakan untuk menempatkan pin digital dari Arduino untuk dihubungkan ke komponen lain.
Jenis-jenis Breadboard
Beberapa ukuran breadboard yang tersedia di pasaran antara lain:- Mini Breadboard, yaitu jenis yang paling kecil diantara semua breadboard dan memiliki sekitar 170 titik koneksi.

- Medium Breadboard, yaitu jenis breadboard ukuran sedang yang kadang juga disebut half breadboard karena memiliki ukuran dan jumlah titik koneksinya setengah dari jumlah titik koneksi breadboard ukuran besar. Yaitu 400 titik koneksi.

- Large Breadboard, yaitu jenis yang ukurannya paling besar diantara semua jenis breadboard dan memiliki sekitar 830 titik koneksi.



Solenoid
linier DC (juga disebut aktuator linier) memiliki gerakan linier yang kuat dan
sangat cocok untuk aplikasi "tugas berat". Desain solenoid linier DC
semacam ini memungkinkan gaya penahan yang tinggi pada arus yang relatif
rendah. Oleh karena itu, solenoid dorong-tarik merupakan aktuator yang ideal
untuk aplikasi yang konsumsi daya dan pembuangan panasnya sangat penting.
Dinamakan "Push/Pull" karena kedua ujung poros tersedia, sehingga
solenoid linier dapat digunakan sebagai solenoid pendorong atau solenoid
penarik, tergantung ujung poros mana yang digunakan untuk koneksi mekanis -
tetapi karena prinsip kerja reluktansi, arah gerakan aktif saat memberi daya
pada kumparan hanya searah. Aplikasi dapat ditemukan pada peralatan medis,
laboratorium, dan analitis.

Fitur
Unit:
Ukuran:35*26*20mm
Pendorong:nomor
8 satuan
Stroke:2-20satuan
Memaksa:2-15N
Kekuatan:7--25DI
DALAM
Saat
ini: 0.5---1.2A
Perlawanan:60--200Oh
Hidup:
≥300.000 kali
Siklus
Kerja: Daya Kontinu
1.
Tindakan dorong-tarik yang tepat: dapat mencapai gerakan linier yang relatif
tepat.
2.
Gaya kuat: dapat menghasilkan daya dorong atau tarikan yang kuat.
Karakteristik
utama berikut dapat dicantumkan untuk solenoida Dorong/Tarik (Kecil):
goresan
hingga 30mm (tergantung jenis)
menahan
gaya hingga 2.000N (pada posisi akhir, berenergi)
dapat
digunakan sebagai solenoida linier tipe dorong atau tipe tarik
umur
pakai tinggi: hingga30 juta siklus dan lebih banyak lagi
waktu
respons cepat: waktu peralihan
ukuran
standar dari diameter 11mm hingga 874mm.
Motor
servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan
sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau
di atur untuk menentukan dan memastikan posisi sudut dari poros output motor.
motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear,
rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros
motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo,
sedangkan potensiometer dengan perubahan resistansinya saat motor berputar
berfungsi sebagai penentu batas posisi putaran poros motor servo.

Prinsip
kerja motor servo:
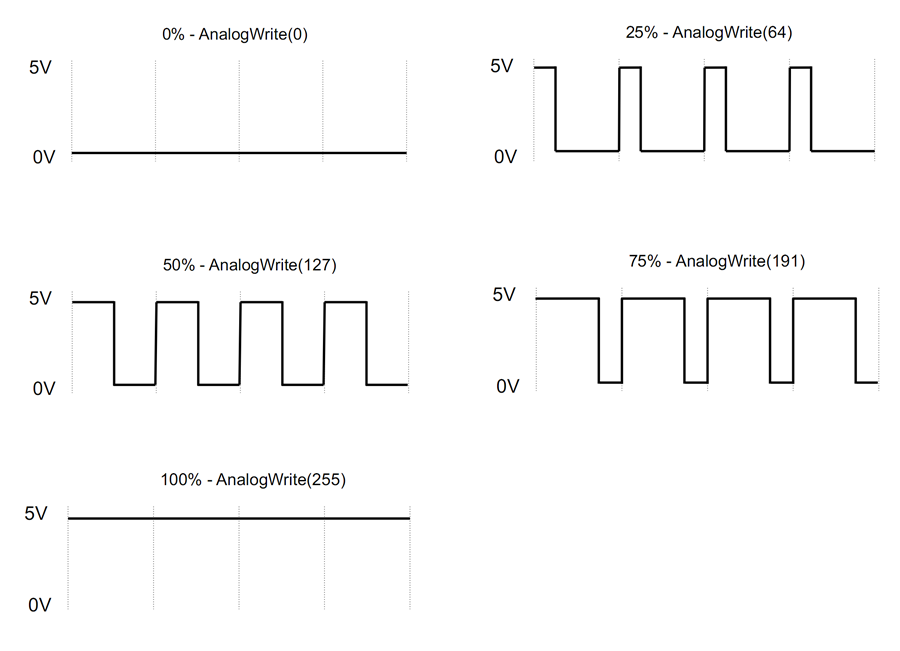
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.

Raspberry Pi Pico dilengkapi dengan 264KB SRAM on-chip. Kapasitas RAM yang lebih besar ini memungkinkan Pico menjalankan aplikasi yang lebih kompleks dan menyimpan data lebih banyak.
Raspberry Pi Pico tidak memiliki ROM tradisional. Sebagai gantinya, ia menggunakan memori flash eksternal. Kapasitas memori flash ini dapat bervariasi, umumnya antara 2MB hingga 16MB, tergantung pada konfigurasi. Memori flash ini digunakan untuk menyimpan firmware dan program pengguna. Penggunaan memori flash eksternal pada Pico memberikan fleksibilitas lebih besar dalam hal kapasitas penyimpanan program.
Raspberry Pi Pico menggunakan crystal oscillator untuk menghasilkan sinyal clock yang stabil. Sinyal clock ini penting untuk mengatur kecepatan operasi mikrokontroler dan komponen lainnya.
Untuk memastikan pasokan tegangan yang stabil ke mikrokontroler.
Untuk menghubungkan Pico ke berbagai perangkat eksternal seperti sensor, motor, dan LED.
STM32F103C8 dilengkapi dengan 20KB SRAM on-chip. Kapasitas RAM ini memungkinkan mikrokontroler menjalankan berbagai aplikasi serta menyimpan data sementara selama eksekusi program.
STM32F103C8 memiliki memori flash internal sebesar 64KB atau 128KB, yang digunakan untuk menyimpan firmware dan program pengguna. Memori ini memungkinkan penyimpanan kode program secara permanen tanpa memerlukan media penyimpanan eksternal.
STM32F103C8 menggunakan crystal oscillator eksternal (biasanya 8MHz) yang bekerja dengan PLL untuk meningkatkan frekuensi clock hingga 72MHz. Sinyal clock yang stabil ini penting untuk mengatur kecepatan operasi mikrokontroler dan komponen lainnya.
STM32F103C8 memiliki sistem pengaturan tegangan internal yang memastikan pasokan daya stabil ke mikrokontroler. Tegangan operasi yang didukung berkisar antara 2.0V hingga 3.6V.
STM32F103C8 memiliki hingga 37 pin GPIO yang dapat digunakan untuk menghubungkan berbagai perangkat eksternal seperti sensor, motor, LED, serta komunikasi dengan antarmuka seperti UART, SPI, dan I²C.



Download HMTL klik disini
Download listing program klik disini
Download video simulasi rangkaian klik disini
- Download datasheet
- Download Library

Komentar
Posting Komentar